| 10 Nov 2021
| 10 Nov 2021
Development of an automated milling system for the decontamination of the wall surface in a nuclear power plant
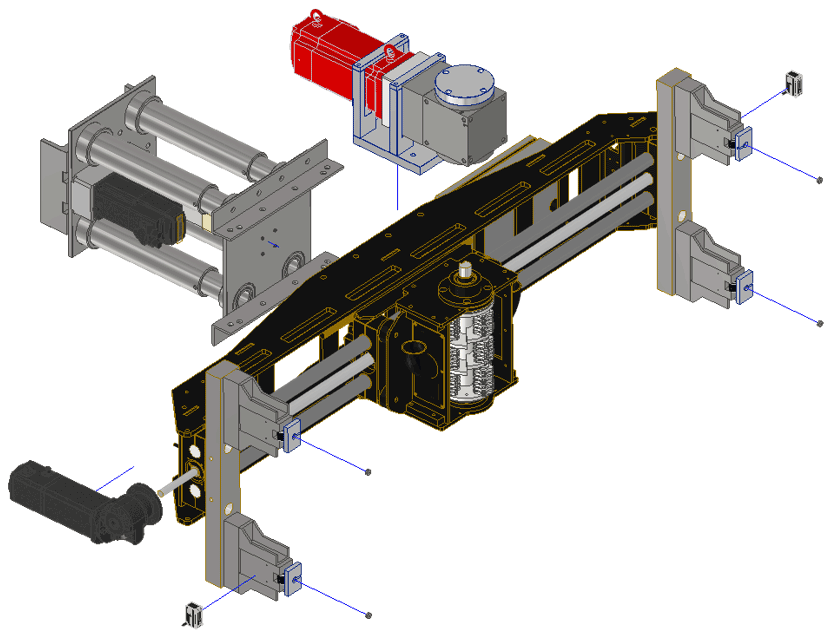
Nowadays, concrete decontamination is done by, e.g., grinding, milling, etc., always combined with labor resources. In order to relieve employees from the monotonous and physically stressful decontamination work, a novel milling system for automated surface decontamination has been developed and assembled. The current work presents this new concept for a milling tool that could automatically position itself to the wall surface and subsequently remove surface contamination. A process chain (Fig. 1) defined in the German Federal Ministry of Education and Research (BMBF)-funded project ROBDEKON was introduced first. The chain consists of a total of five steps for a compact process, from environmental exploration to the transportation of waste. This automated decontamination is the third step in the process chain for decontamination of building structures in nuclear facilities. The structure (Fig. 2) of the milling system and the function of each component are then explained in detail. With the assembled sensors, such as a laser distance sensor, a force sensor etc., the various physical quantities can be measured in real time, thus enabling automation of the milling process during decontamination.
Heutzutage erfolgt die Betondekontaminierung, z. B. durch Schleifen, Fräsen usw., immer in Verbindung mit Arbeitskräften. Um die Mitarbeiter von diesen monotonen und körperlich belastenden Arbeiten zu entlasten, wird ein neuartiges Frässystem zur automatisierten Oberflächendekontaminierung entwickelt und montiert. In unserer Arbeit wird das Konzept für dieses Fräswerkzeug vorgestellt, das sich automatisch an der Wandoberfläche positionieren und anschließend die Oberflächenverunreinigung entfernen kann. Zunächst wird eine im BMBF-geförderten (BMBF: Bundesministerium für Bildung und Forschung) Projekt ROBDEKON definierte Prozesskette (Abb. 1) vorgestellt. Diese besteht aus insgesamt 5 Schritten für einen kompakten Prozess von der Umwelterkundung bis zum Abfalltransport. Die automatisierte Entfernung der radioaktiven Verunreinigungen ist der 3. Schritt der Prozesskette zur Dekontaminierung von Gebäudestrukturen in kerntechnischen Anlagen. Anschließend werden der Aufbau (Abb. 2) des Frässystems und die Funktionen der einzelnen Komponenten ausführlich erläutert. Mit den montierten Sensoren wie Laserdistanzsensor, Kraftsensor usw. können die verschiedenen physikalischen Größen in Echtzeit gemessen werden und ermöglichen so die Automatisierung des Fräsprozesses bei der Dekontaminierung.